제어에 대한 기초적인 개념을 공부하고 정리하는 글
목차
제어(Control)

1. 제어 시스템 모델링
1.1. 라플라스 변환
개략적인 이해 : 어떠한 함수를 다른 함수로 변환시켜주는 방식, 미분방정식 풀 때 유효
수학적인 이해 :

◆ 제어 시스템에서의 라플라스 변환
제어 시스템 응답이
- 시간에 따라 응답이 나오는 것이 있고
- 주파수에 따라 응답이 나올 수 있는데
이 여러 응답들 간의 서로간의 변환이 요구되기 때문에 필요로 한다라고 이해.


1.2. 전달함수
주파수 영역에서
입력(R(s))에 대한 장치의 출력(C(s))의 관계를 표현(G(s))하는 수학적 함수
◆ 비선형 시스템
조작부의 포화
motor의 dead zone
backlsh in gears
→ 선형화로 모델링
2. 제어 시스템의 간소화
2.1. 블록선도의 이해
블록 선도 : 하드웨어/소프트웨어 개발자가 작업 흐름과 공정들을 설명하면서 시스템을 묘사하기 위하여 사용하는 기초적인 방법
- 물리적 신호 흐름
- 요소의 연결

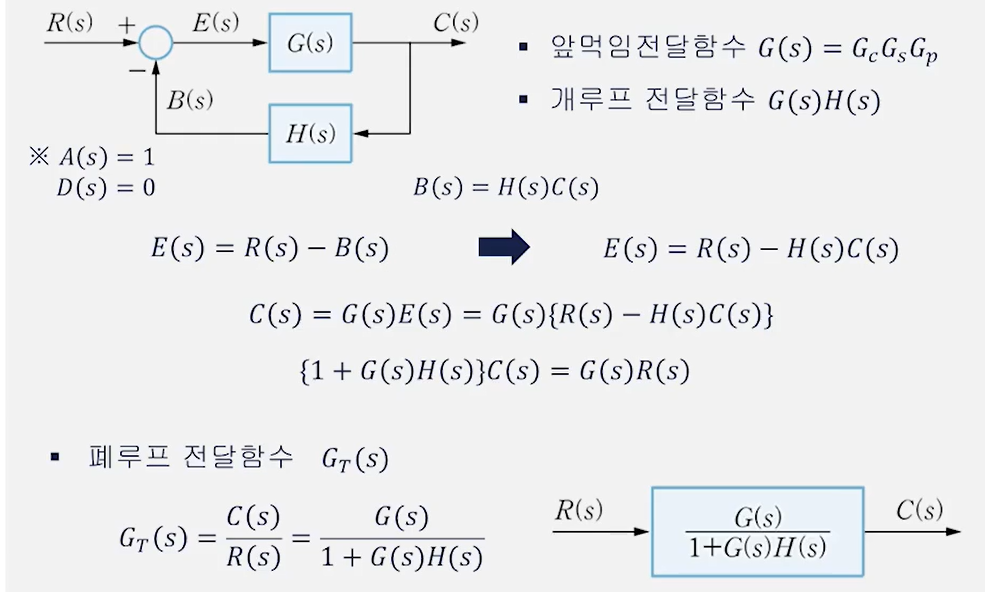
2.1.1. 폐회로 시스템의 블록 선도


피드백 시스템
3. 제어 시스템 성능

3.1. 제어시스템의 안정도
- 극점-영점

시간 응답에서 극점 위치에 따라 안정도를 판단 가능
전달함수 = 실수부 + 허수부
s = Re(s) + jIm(s)
전달함수의 극점이 실수부에 존재하는 경우
- Re(s) < 0 : 안정
- Re(s) > 0 : 불안정
- Re(s) = 0 : 임계 안정 → sin이나 cos 성질이 추가된다고 생각
3.1.1. 주파수 응답에서의 안정도

상대적인 안정도
3.2. 제어 시스템의 시간 응답
시간 응답

2차 시스템


미감쇠 고유주파수(undamped natural frequency ωn) → 2차 시스템에서 감쇠가 없는 시스템의 고유 주파수
시그마에 따라 감쇠가 결정되기 때문에 시그마를 감쇠비라고 함.
3.2. 과도 응

마무리
갑자기 수학적으로 다가오니 조금 낯설어서 공업 수학에 대해서 조금 찾아보면서
어떻게 적용되는지를 분석해볼 필요가 있음.
'제어' 카테고리의 다른 글
| [제어] 제어에 대한 기초 개념 내용 정리 (0) | 2023.04.08 |
|---|

댓글